
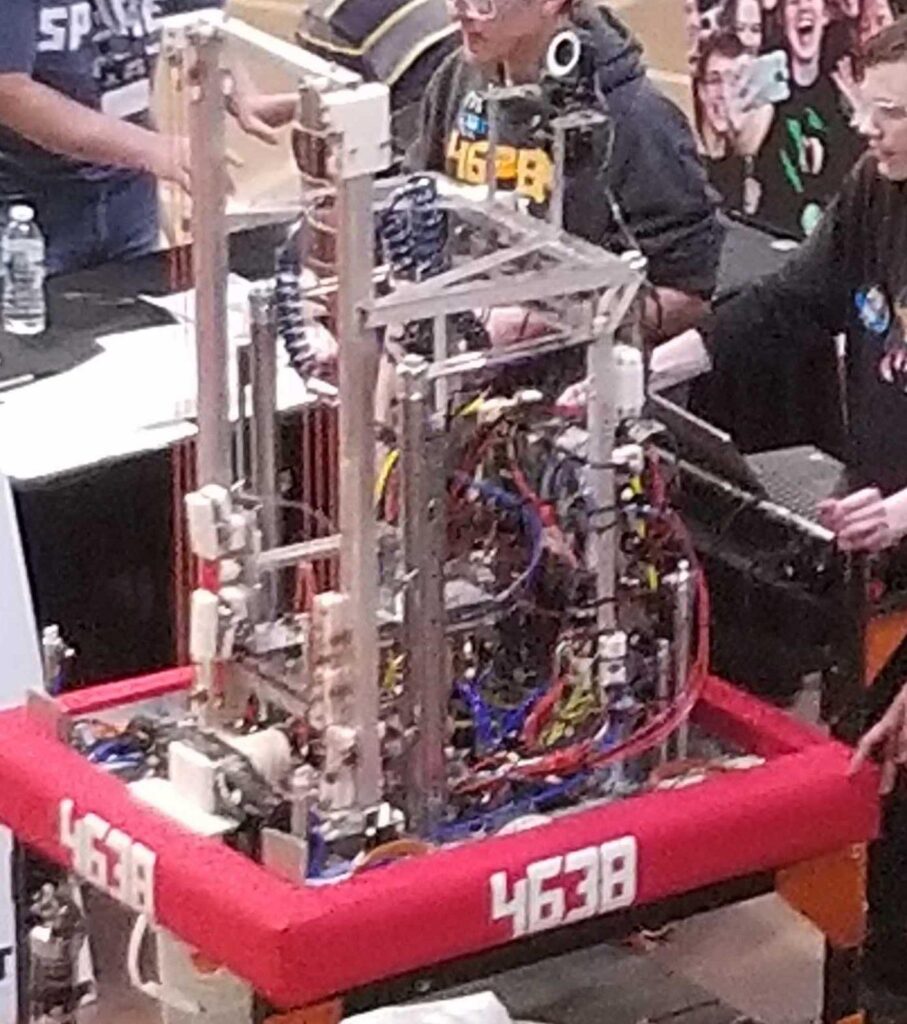
FRC 2025: Reefscape – Geyser
In the 2025 Reefscape competition, our robot Geyser came to life with major upgrades. We switched from Neo 1.1s to Neo Vortex motors, giving our drivetrain more speed and torque for precise maneuvering. We also built a custom 3-stage cascade elevator, capable of scoring on all four levels of the reef. We used a funnel intake so Geyser could collect and score game pieces with accuracy.
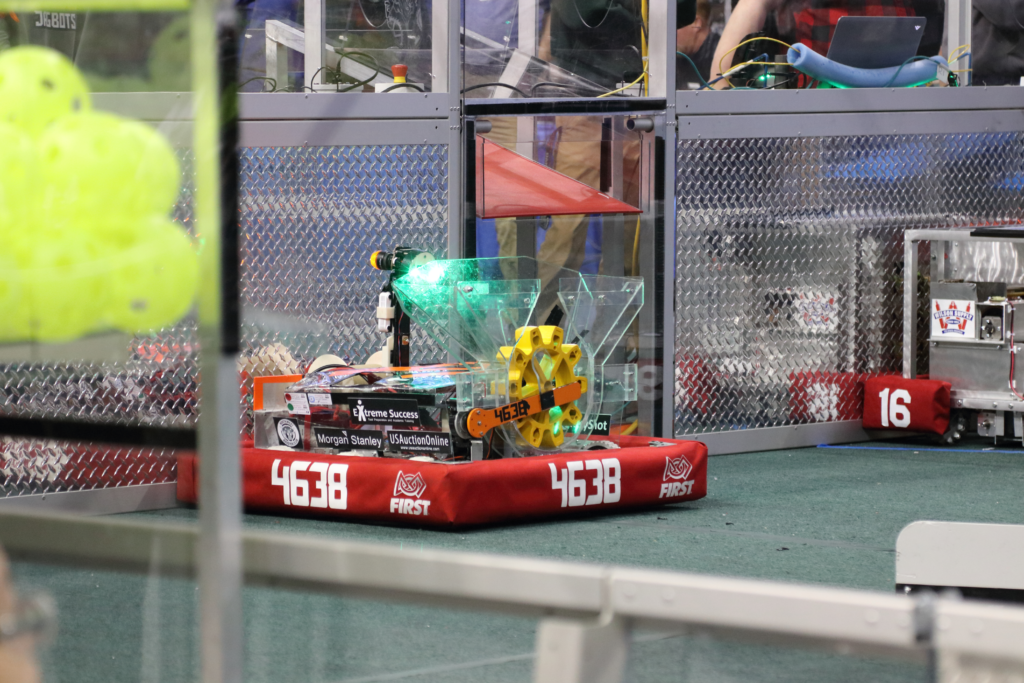
FRC 2024: Crescendo – Stephen Roboticus XII
In the 2024 competition, our knight in shining armor Stephen Roboticus XII came to life. We took inspiration from this year’s kitbot, implementing a ground level intake system to scoop up the game pieces. Our big canon of a shooter then takes those pieces and shoots them out using flywheels. This two subsystem process let us rapidly shoot into a slot. Our climb used the winch system climber-in-a-box from Andymark, which pulled itself up like a beast on the chain. Using last year’s swerve, we put this all together and zoomed past our peers.
FRC 2023: Charged Up – G-Rover
In the 2023 FRC competition, we presented our robot G-Rover. This year marked a significant milestone for our team as we successfully implemented swerve drive into our robot for the first time. G-Rover had an arm capable of extending up to 36 inches, and a shoulder being able to rotate full 120 degrees. The wrist could pitch and twist simultaneously, allowing for precise manipulation of objects across the field.
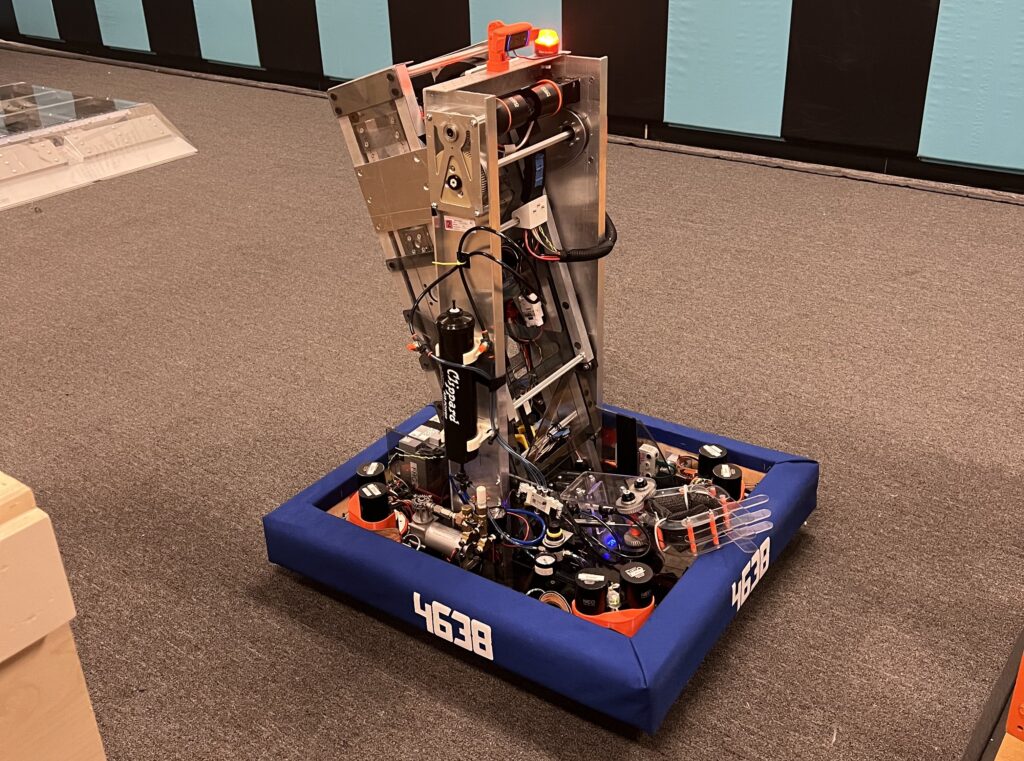
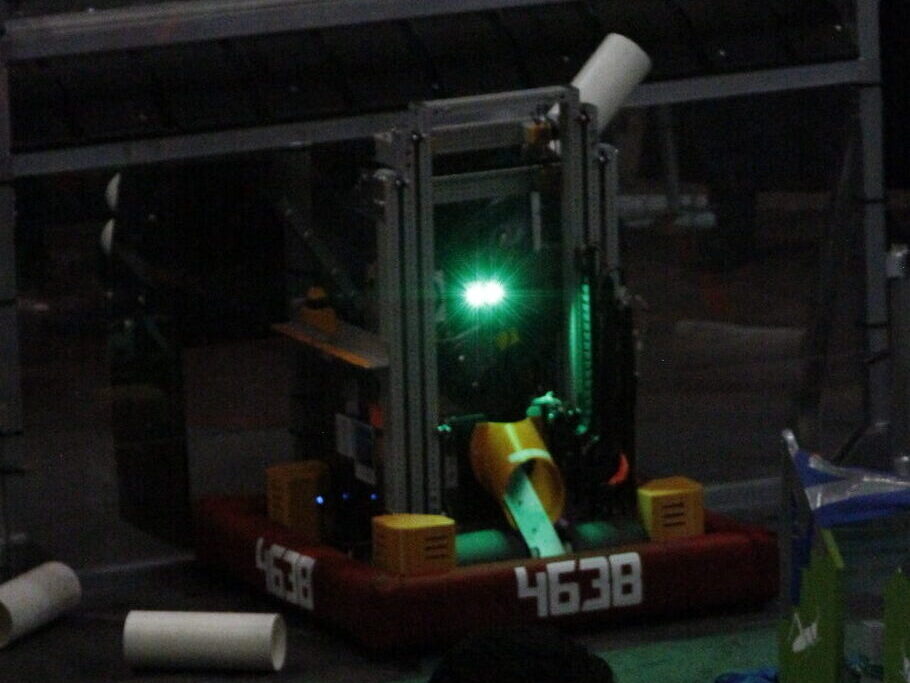
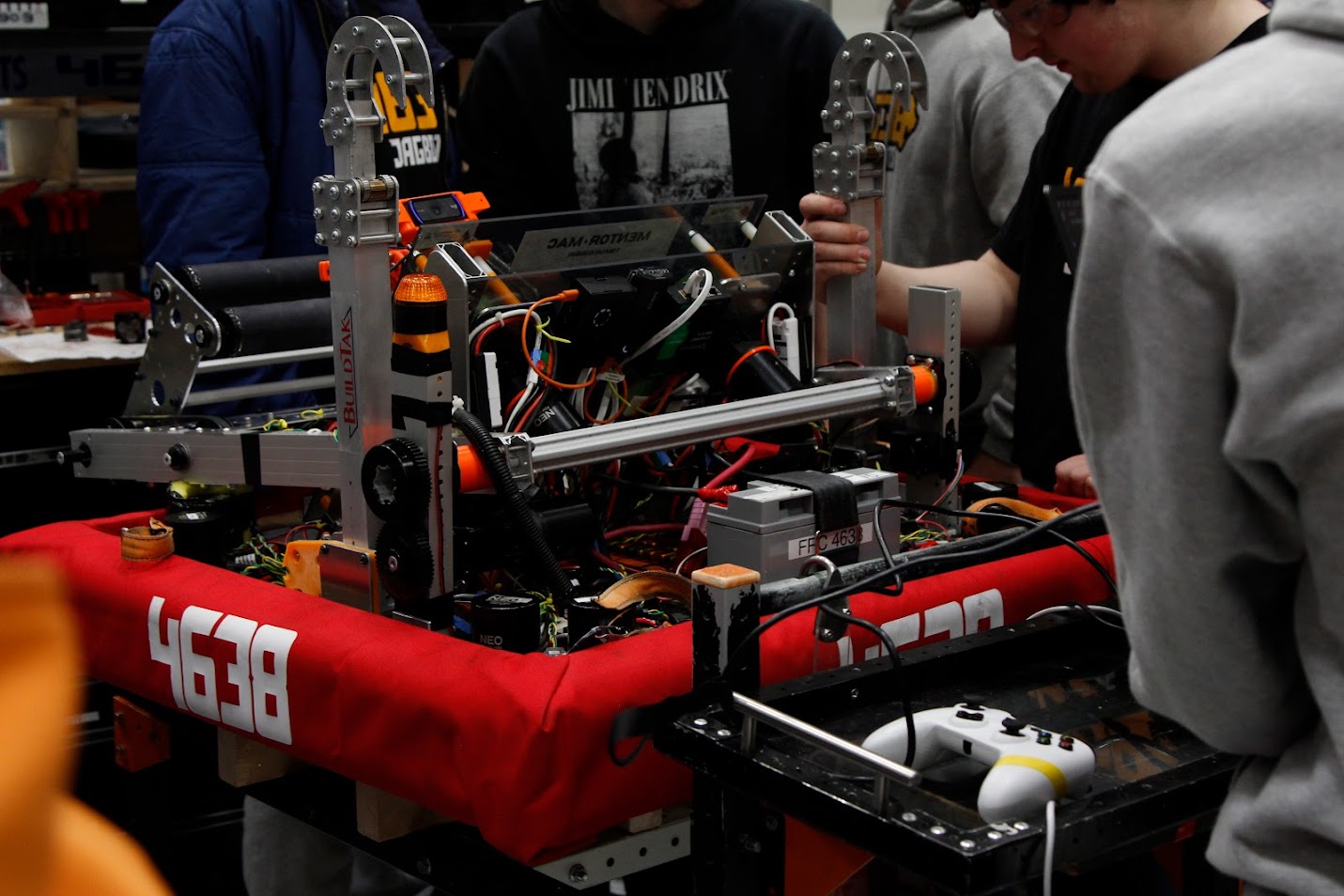
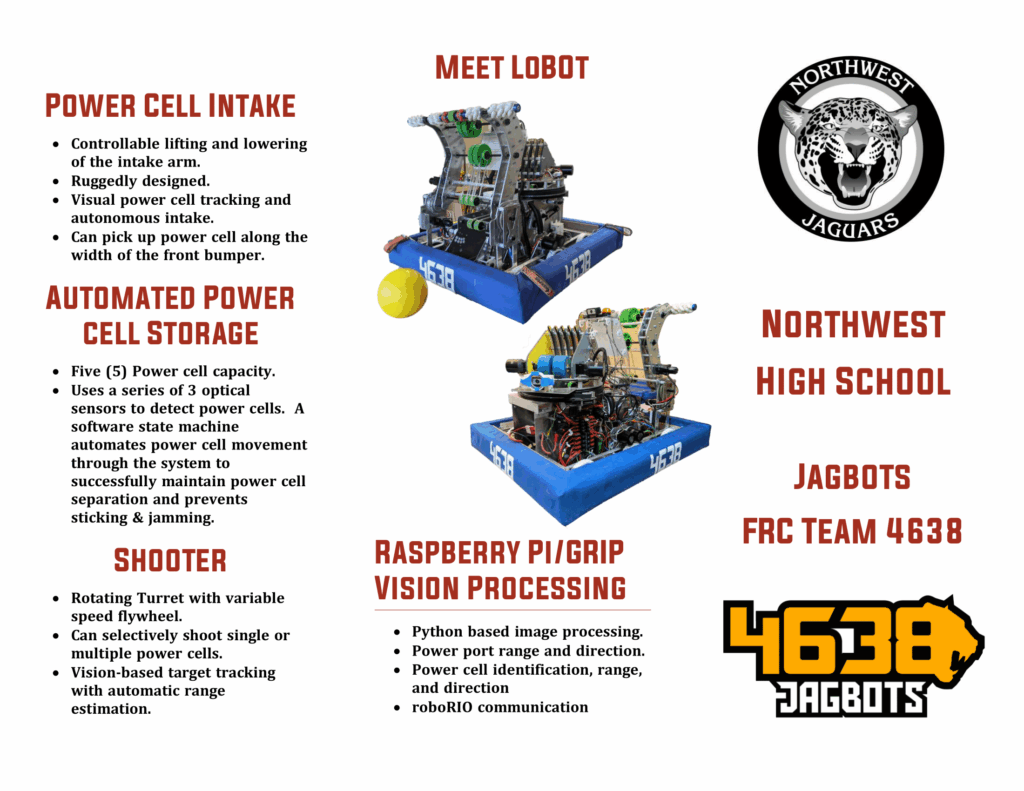
FRC 2020-21: Infinite Recharge – Lobot
In the 2020 FRC competition, we presented our robot Lobot. This year was a major milestone for our team as we successfully implemented a variable-angle turret for the first time in team history, powered by Python-based image processing. Lobot also featured a pivoting ground intake, allowing for efficient collection and handling of game pieces across the field.
Click here to learn more about the 2020-2021 FRC Competition.
FRC 2019: Deep Space – Deader Pixel
In the 2019 FRC competition, our robot Jagbot 2019 was equipped with a customized grabber and in order to move and place the hatches that were part of that year’s challenge in order to score points. It also featured the Jagbots signature 6 wheel tank drive.
FRC 2018: Power Up – Dead Pixel
In the 2018 FRC competition, our robot Dead Pixel was equipped with a claw machine-like grabber and lead screw lift combination in order to move and place the blocks that were part of that year’s challenge. The robot also had a ratchet with spool along with the lift to climb onto the bar that was part of the game. We also had a hook to allow multiple robots to climb onto the small bar which was difficult for multiple people to get on at once.

FRC 2017: Steamworks – Gizmo
In the 2017 FRC competition, our robot was Gizmo. The robot had a cradle to intake and transport the gears that were part of that year’s game. An Igus slide moved the entire cradle 3 inches to either the left or right for adjustment when placing the gear. There was also a gear pusher activated by a motor for when we in position to place gears. For the climb that was included in that year’s challenge, our robot also had a winch equipped with velcro tape.
FRC 2016: Stronghold – Black Knight
Black Knight was our robot for the 2016 FRC competition. That year’s game involved shooting balls into a tower, so we equipped the robot with dual flywheels on a vision guided turret, and the flywheels were designed so that the motors are self contained inside the flywheels themselves, along with a polycord-driven roller intake for the balls.
FRC 2015: Recycle Rush – Captain Planet
Black Knight was our robot for the 2016 FRC competition. That year’s game involved shooting balls into a tower, so we equipped the robot with dual flywheels on a vision guided turret, and the flywheels were designed so that the motors are self contained inside the flywheels themselves, along with a polycord-driven roller intake for the balls.

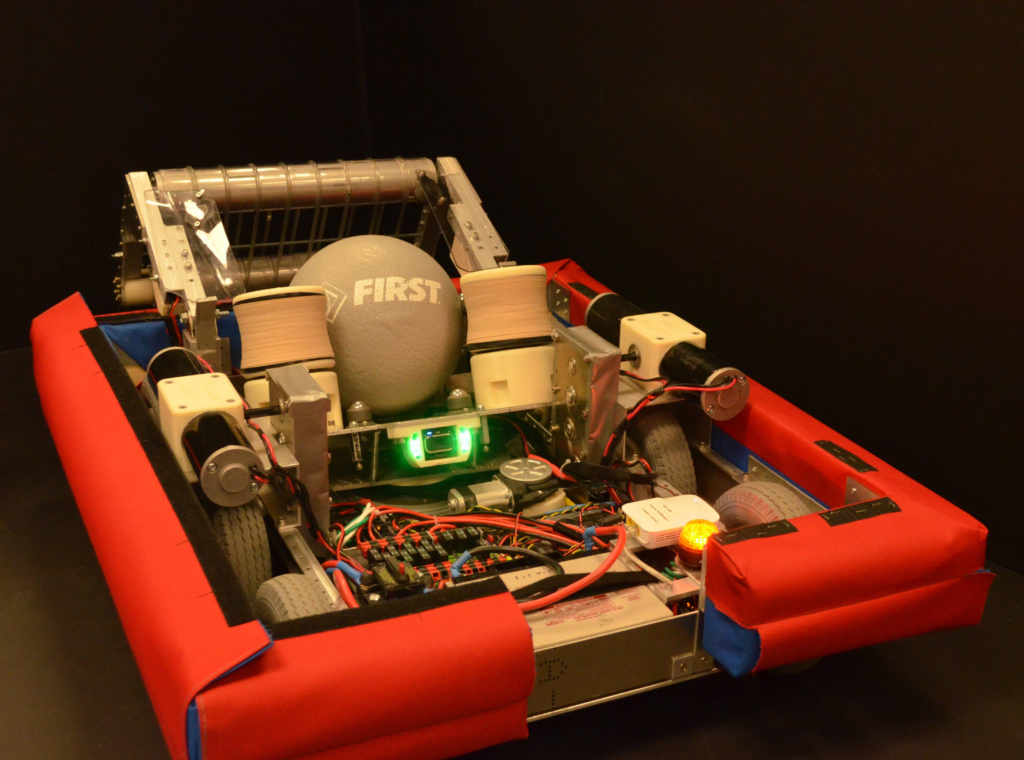
FRC 2014: Aerial Assist – Fridgebot
Our robot, Fridgebot, was a unique one in the 2014 FRC competition, as the balls used in that year’s game could pass through the robot. Being able to intake balls from one side and output through the other saved time from having to turn around to shoot. The robot also used doors to hold balls in place when carrying them, since it was easy for the ball to pass through our robot.
FRC 2013: Ultimate Ascent – JagTron
Jagtron was our team’s very first robot, and had a frisbee shooter for the main aspect of that year’s game in 2013. The shooter had a pneumatic wheel as flywheel for frisbees and a single action pneumatic piston to punch frisbees into the flywheel. The frisbee shooter also had an angle adjustment chain, with a pivot on the center, and came with a 3 frisbee hopper for storage. In order to complete the climb aspect of the game, the robot also had two pneumatic grabber lifts.
